
Lieu de la compétition : La Ferté Bernard (Sarthe)
Description : Les robots ont pour objectif de déplacer et empiler des verres, ouvrir des cadeaux, souffler des bougies, lancer des cerises sur le sommet du gateau, et gonfler un ballon.
La Coupe de France de Robotique est organisé lors du festival ARTEC à la Ferté Bernard. Du 8 au 11 mai, des écoles mais aussi des passionnés de robotique s’y retrouvent afin de faire participer les robots qu’ils ont conçus durant l’année. Bien qu’il y est parfois du stress dans les stands, la bonne humeur, et l’entraide règne parmi tous. Nous y sommes allés pour faire participer nos robots TY4-2K13 principal et TY4-2K13 auxiliaire, mais surtout pour rencontrer d’autres passionnés et partager nos connaissances.
Pour une deuxième participation et une préparation quelque peu pressée, nous nous félicitons de notre performance :
64ème sur 146 participants homologués, avec 2 victoires et 3 défaites.
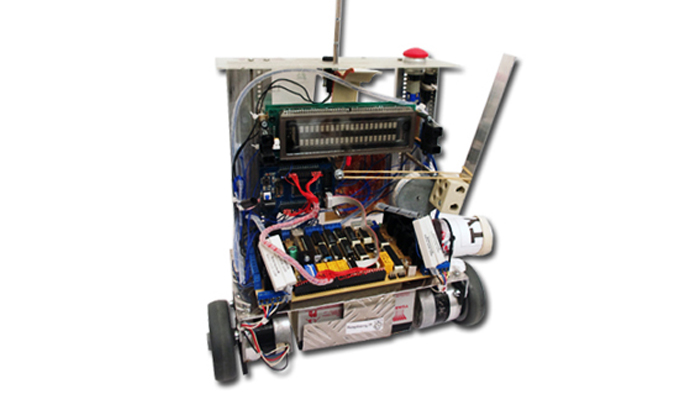
Chargé de valider les « bougies ». Il se place devant chaque bougie puis effectue une mesure de la couleur, si la couleur correspond, il tape trois fois pour valider le point. Il fait toutes les bougies de l’étage du bas.
Motorisation : Moteurs pas-à-pas unipolaire.
Capteurs : Capteurs infrarouges SHARP (2 avant et 2 arrière) avec portée modifiable de 4 à 30 cm.
Microcontrôleurs : Atmel 2x Atmega128 et 2x Atmega8 programmés en C.
Type de conception électronique : Wrapping
Système d’évitement : S’immobilise
Alimentation : batterie 12V 1.2Ah
Autonomie : 20 minutes min.
Dimensions : 180 (Profondeur) x 320 (Largeur) x 430 (hauteur) mm

Chargé de valider les « cadeaux ». Il commence par déployer son bras, puis pousse un a un les cadeaux correspondant à sa couleur. Si il détecte un autre robot sur sa route, il s'immobilise.
Motorisation : Moteurs pas-à-pas unipolaire.
Capteurs : Capteurs infrarouges SHARP (2 avant et 1 arrière) avec portée modifiable de 4 à 30 cm.
Microcontrôleurs: Atmel Atmega32 et Atmega8 programmés en C
Type de conception électronique : Wrapping
Système d’évitement : S’immobilise
Alimentation : batterie 12V 1.2Ah
Autonomie : 20 minutes min.
Dimensions : 150 (Profondeur) x 170 (Largeur) x 430 (hauteur) mm (Périmètre de 550 mm non déployer) longueur du bras de 150 mm
Notre premier match s’est très bien déroulé. De plus notre adversaire R3EA de Reims était une équipe très agréable et conviviale.
Nous les remercions encore pour leur sympatie et pour le pot d’après match !
Deuxième match contre une équipe très sympathique avec deux robots. Leur robot secondaire avait une mécanique simple capable d’envoyer les balles de ping pong.
Malheureusement leurs robots ne sont pas sorties de leurs zones de départ et nous avons pu marquer nos points.
Troisième match contre une équipe utilisant un pc portable type eeepc directement embarquer sur le robot.
Ils nous ont donné des conseils sur l’utilisation du port USB CAN.
Encore une fois le robot adverse n’est pas sortie de sa zone de départ.
Quatrième match contre un des robots les plus fun du concours, ce dernier, possédait des dreadlocks qui se gonflaient en fin de match. Mais suite à une erreur de chargement de programmation (en coulisse), le robot a foncé sur TY4-2K13 aux. qui s’est protégé avec son poing de boxe.
La scène est assez fun a regarder.
Notre dernier match s’est déroulé contre Goldorak.
Nos adversaires nous ont apporté quelques conseils sur la fabrication d’une imprimante 3D.
Leur robot secondaire ne détecte pas notre robot principal TY4-2K13.